Baubericht Mikado Logo 600 3D V-Stabi 4.0
Auf dieser Seite möchte ich ein paar Anregungen zum Aufbau des Modellhubschraubers Logo 600 3D V-Stabi geben.
- Modell: Logo 600 3D mit V-Stabi 4.0
- Motor: Kontronik PYRO 30-12 (mit Motorplatte Aluminium LOGO 500/600 30mm)
- Regler: Kontronik JIVE 80+ HV (mit Kühlkörper und 6mm Goldkontaktsteckern)
- Akku: 5000mAh 10S1P 37V 30C/55C Stick (LxBxH 318x48x29mm, 1330 Gramm). Wegen der Akkulänge ist es notwendig ca. 30 Gramm Blei ans Heck zu montieren. Bei wechselnden Drehzahlen (1800-2000 u/min) fliege ich innerhalb von 5,5 Minuten zwischen 3000 mAh und 4000 mAh raus. Mit den TopFuel Hacker 30C 5000 mAh 10S-Long ist kein Blei notwendig, da diese eine kürzere Bauform haben (LxBxH 303x48x48, 1395 Gramm).
- Servos: 3 x Futaba Digital Brushless BLS 451 und 1 x Futaba BLS 251
- Empfänger: Futaba R-6008 HS 2,4 GHz (kann im HS-Modus betrieben werden)
- Hauptrotorblätter:
- Radix 600mm SB Carbon (126 Gramm): Sind nicht so agil wie die FunKey, funktionieren aber hervorragend. Diese Blätter funktionieren am besten mit V-Stabi zusammen, weshalb ich das Setup hier auf diese Blätter beziehe.
- FunKey Carbon 3D 610mm: Sehr hohe Agilität und trotzdem lässt sich der Heli auch feinfühlig steuern. Diese Blätter haben ca. 5 mm Vorlauf.
- CFK Torsion Blades 600mm Flybarless
- Maniac 603 mm: Mit diesen Blättern ist der Heli unheimlich agil, was offensichtlich am Vorlauf von ca. 5 mm liegt. Ich kann damit aber kein zufriedenstellendes Setup finden. Die feinfühlige Steuerbarkeit z.B. in Piru-Loopings fehlt mir.
- Heckrotorblätter: FunKey Carbon Heckrotorblätter 105mm
- Ritzel 12 Zähne pfeilverzahnt M1, Ø6mm
- Hauptzahnrad mit Pfeilverz. 106 Z. Mod. 1
- Fluggewicht (inkl. 1,38 kg schwerem Antriebsakku): ca. 3,9 kg
Diesen Heli habe ich auch in den neXt RC Modellflugsimulator eingebaut.
Tipps zum Zusammenbau:
- Chassis: Die scharfen Kanten der beiden Kunststoffseitenteile habe ich mit einem Messer entgrätet. Besonders sorgfältig an den kabelführenden Stellen.
- Heckrotor: Obwohl ich alle Passscheiben verbaut habe, hatte die Heckrotorwelle noch horizontales Spiel. Alle Verbindungs-Schrauben sollte man so anziehen, dass sie einen halben Millimeter aus den M3 Stoppmuttern rausschauen. So stehen die Karbon-Seitenplatten exakt parallel zueinander. Ich musste den Alu Sechskant um einen halben Millimeter kürzen damit das Ganze spielfrei war. NEU: Nach ca. 20 Flügen hatte das Kugellager im Carbonteil 4078 in alle Richtungen einen Millimeter Spiel. Offensichtlich ist das Carbon nicht hart genug. Ich habe das Ganze demontiert, die Carbonkante im Bereich des Kugellagers mit dünnflüssigem Sekundenkleber gehärtet und das Lager wieder sauber eingepresst. Den Alu Sechskant habe ich durch eine weitere Andruckrolle (Nr 4104, 1961, 4107) ersetzt.
- Hauptrotor: Die Klemmhülse (2385) muss man gut festziehen da diese sich bei Negativ Pitch leicht löst und die Hauptrotorwelle dann vertikales Spiel bekommt. Die Folge ist dann ein kaputtes Hauptzahnrad. Ich habe von oben einen Tropfen dünnflüssigen Sekundenkleber aufgebracht, damit sich das Teil auf keinen Fall verschiebt.
-
Rotorkopf Zentralstück:
WICHTIG !!! Mir standen zwei neue Rotorkopf-Zentralstücke zur Verfügung und beide
eierten in einer Montagerichtung. In der jeweils anderen Montagerichtung waren sie perfekt zentriert. Jetzt könnte man meinen,
dass die Hauptrotorwelle krumm ist... vermutlich nicht, denn ich habe auch eine zweite Hauptrotorwelle getestet mit selbigem Ergebnis.
- Also: Aufstecken, die lange M3 Schraube eindrehen und die beiden Klemmschrauben anziehen, Motor in niedrigster Drehzahl kurz laufen lassen (natürlich ohne Haupt- und Heckrotorblätter) und den oberen Bremsteller beobachten. Wenn dieser eiert, dann das Zentralstück drehen und noch mal probieren. Eine Richtung passt... so war's zumindest bei den von mir getesteten Teilen.
- Heckauslegermontage: Vor dem Aufkleben der Kugelköpfe auf die Carbon-Heckstreben solltet Ihr das Carbon im Bereich der Klebung mit Schmirgelpapier oder einer feinen Metallfeile anfeilen. Nur so wird die Verklebung kraftschlüssig. Zusätzlich habe ich noch mit 1mm dicken und 5mm langen Modellbaunägeln verstiftet.
- RC-Anlage: Das V-Stabi Patchkabel für Pitch wird am neuen Futaba Empfänger auf Kanal 3 eingesteckt. Nicht wie beschrieben auf Kanal 6. Auf Kanal 6 kommt der Drehzahlregler.
- RC-Anlage: Den V-Stabi AUX Kanal habe ich mit einem zusätzlichen Patchkabel an Kanal 5 (normal Kreiselempfindlichkeit) angeschlossen. Mit den Werten 0, 25, 50 und 75 schalte ich so Flugphasenabhängig zwischen Bank 0, 1, 2 und 3 um (Futaba). So kann ich verschiedene 3D Drehzahlen fliegen.
- Servoeinbau: Da ich die mit den BLS 451 gelieferten und sehr stabilen T-förmigen Servohebel verwenden wollte, habe ich die Taumelscheibengestänge auf 18,25 mm eingehängt. Das ist das äußerste Loch im längeren Hebelarm. Wie ich erst nach ein paar Flügen festgestellt habe, reicht der von Mikado vorgeschlagene Einhängepunkt im Abstand von 16mm nicht für eine volle 3D Steuerbarkeit aus. Die 18,25 mm weisen im Vergleich zu einem T-Rex 600 Nitro Super Pro Rotorkopf zwar immer noch Steuerlücken auf, stellen aber einen guten Kompromiss dar. Wenn ich den Taumelscheibenknüppel in eine Ecke drücke (natürlich mit Taumelscheibenring) und gleichzeitig Pitchwerte mit 9° benötige, bleibt die Taumelscheibe beim Originalsetup schon bei Pitchwerten um die 5° stehen. Das macht sich natürlich durch ein ungewöhnliches Flugverhalten bemerkbar. Das Heckservogestänge habe ich auf 13,5 mm eingehängt. Vor dem Einbau des rechten Rollservos ist es sinnvoll auf der Innenseite den Durchgang für die BEC Kabel zu erweitern.
- Anlenkungen: Bei mir haben die Kugelgelenke der drei Taumelscheibenanlenkungen einen Abstand von 1,74 cm. Und bei den zwei Gestängen zu den Blatthaltern sind es 4,398 cm. Diese Einstellung ergibt ohne weitere Korrektur symmetrische Pitchausschläge. In Nullstellung stehen die Servohebel nicht im rechten Winkel zum Servogehäuse, sondern sind um ca. 2° nach oben gestellt (siehe Foto unten).
- Haubenmontage: Bei meiner Logo Airbrush-Haube waren die 3mm Abstandshülsen passend.
- Fahrwerk: Wie mir schon bei Nico Niewind's Logo aufgefallen ist, habe ich auch auf das Align T-Rex 600/700 Fahrwerk umgerüstet. Nach leichter Modifikation passt dieses perfekt auf den Logo und hält dem Gewicht des 4kg Helis problemlos stand.
- Rotorkopf: Beim Einbau der äußeren Kugellager in die Blatthalter sollte man darauf achten, dass diese auch wirklich bis ganz am Anschlag eingeschoben sind. Im Zweifel erst einstecken, dann wieder herausdrücken und gegebenenfalls störende Kunststoffrückstände entfernen. Dann wieder das Kugellager einsetzen. Zum Eindrücken habe ich die Blattlagerwelle mit einer eingeschraubten Endschraube verwendet. So passiert den Kugellagern nichts und sie verkanten sich auch nicht beim Einschieben. Die Dämpfungsgummis darf man auf keinen Fall einfetten. Die Blatthalterschrauben werden mit mittelfestem Loctide versehen und dürfen auch nur ganz leicht angezogen werden, da sich ansonsten die Enden der Blattlagerwelle weiten und dann gar nichts mehr passt.
- Motoreinbau: Die beiden Madenschrauben im Motor sollten wie in der Kontronik-Anleitung beschrieben unbedingt geprüft werden. Es ist schon vorgekommen, dass beim Herstellen des Motors keine Schraubensicherung verwendet wurde. Die Madenschraube im Motorritzel habe ich mit mittelfestem Loctide montiert. Zur Montage des Kontronik Motors sind zwei hochwertige M4 x 16mm Schrauben mit passenden Unterlagsscheiben notwendig. Auch für diese Schrauben habe ich Loctide verwendet.
- RC-Anlage V-Stabi: Die Montage des V-Stabi Sensors ist sehr knifflig da dieser ja exakt zur Modellachse ausgerichtet sein muss. Dazu habe ich erst das Befestigungspad auf den Sensor geklebt. Auf der Sensor-Hinterseite habe ich ein Isolierband temporär angebracht und darauf die Mitte des Sensors angezeichnet. Dann habe ich den Kreisel von hinten ins Chassis gehalten, an die Vorderwand angelehnt und dabei die Hinterkante des Sensors um ca. 20° nach oben gekippt. Dann ganz einfach an der Wand nach unten fahren lassen und dabei über die Chassisnaht peilen damit die Sensormitte genau fluchtet. Unten angekommen, mit der Hinterkante des Pads am Boden aufsetzen und dann nur noch nach vorne abkippen. So ist das Sensorelement exakt mittig und axial ausgerichtet.
- RC-Anlage Flugakku: Die Seitenflächen des Akkuschachts habe ich mit 1 cm dicken Schaumstoffplatten (Graupner 701.10) ausgekleidet. So passt der 48 mm breite Flugakku saugend rein und kann sich nicht verletzen.
- RC-Anlage 2,4 GHz Antennen: Die Antennen sind in Bowdenzugröhrchen verlegt, die ich mit einem Feuerzeug so erhitzt und gebogen habe, dass diese zueinander im 90° Winkel abstehen. Auch die vertikale Neigung der beiden Antennen ist unterschiedlich (ca. 45°). Damit wird sichergestellt, dass im Flug kein toter Winkel entsteht. Die Antennenröhrchen habe ich mit Sekundenkleber und Glasperlen in einer Kunststoffplatte verklebt, welche ich wiederum mit einer Schraube mit dem Chassis verbunden habe. Gleichzeitig wird mit dieser Schraube das Heck gegen Verdrehen gesichert da sie ca. 2 mm weit in das Alu-Heckrohr hineinragt.
- Haubenmontage: Damit die Haube nicht klappert, habe ich auf den vorderen Fahrwerksbügel eine 5 mm dicke Schaumstoffplatte geklebt.
- Steckverbindungen: Wegen dem deutlich geringeren Übergangswiderstand habe ich den Regler und den Motor mit 6 mm Goldkontaktsteckern verbunden. Auch zwischen Akku und Regler ist diese Steckverbindung zu empfehlen da diese bis zu 200A verkraftet. Um den Einsteckfunken zu verhindern habe ich an der Minus-Leitung des Reglers noch einen überstehenden Widerstand angelötet (5 bis 6 Ohm Widerstand, 0.5 bis 1 Watt Leistung). Beim Einstecken streife ich erst am Widerstand vorbei, bevor ich den Stecker zügig einstecke.
- BEC: Da ich mit 6V BEC-Spannung fliege, habe ich wie in der Anleitung empfohlen eine zweite BEC Leitung verlegt und am Batt-Anschluß des Empfängers angeschlossen.
- Antistatisch: Bei bestimmten Wetterbedingungen kann der Antriebsriemen des Heckrotors antistatische Aufladungen erzeugen, die sich in kurzzeitigen Systemausfällen bemerkbar machen können. Um das zu verhindern habe ich den Minus-Pol des Empfängers über ein abgespecktes Servokabel mit dem Heckrohr verbunden. Dieser Tipp kam gleich von zwei Seiten (Nico Niewind und Christian Samuelis). Vielen Dank dafür.
- Wenn nach dem Einstecken des Akkus der Regler keine Tonabfolge von sich gibt, steht der Motor gerade auf einer ungünstigen Position. Einfach den Motor ein wenig verdrehen und erneut den Akku anstecken.
- Erstflug: Problematisch ist der Erstflug, da ich für den Regler den Gasknüppel auf Standgas haben sollte und aber gleichzeitig V-Stabi mit Vollgas den Beginn des Trimmfluges signalisieren muss. Hier muss ein Gaslimiter her. Diese hilfreiche Funktion ist ja schon von Graupner/JR Anlagen bekannt. Inzwischen gibt's per Softwareupdate auch für Futaba Fernsteuerungen einen 'Gaslimiter'. Mit einem Schieberegler kann ich das Gas limitieren, so dass der Motor auf keinen Fall loslaufen kann, egal was ich sonst an der Fernsteuerung mache. Erst wenn ich den Gaslimiter nach oben schiebe, kriegt der Regler ein Gassignal. Also, Limiter zu, Gasknüppel auf Vollgas und Heli einschalten. Dann kommen die zwei Pitchzucker vom V-Stabi. Jetzt den Gasknüppel wieder auf Standgas zurück, den Limiter aufdrehen und ab zum Trimmflug.
Meine Gasprogrammierung (12er Ritzel):
- 3D High: 70% (linear, 2190 u/min)
- 3D Soft2: 60% (linear, 2040 u/min)
- 3D Soft1: 55% (linear, 1840 u/min)
Heli-Einstellung:
- Pitch 3D: -13° +13° (mit FunKey -12,5° +12,5°)
- Pitch Autorotation: -6° +14°
Vor der Programmierung sollte bei Futaba Sendern der Gaskanal invertiert werden. Die Gaskurve stelle ich dann temporär als gerade Linie von links 0% auf rechts 100%. Der Kontronik Heli Jive 120+ HV funktioniert im Modus 4 sehr zuverlässig. Der 'KSA Modus' darf in dieser Kombination nicht aktiviert werden.
V-Stabi-Einstellung:
- Bank1 (für agiles 3D): Pitch
100, Wendigkeit
48, Empfindlichkeit
55, Steuerverhalten
Weich, Expo
Linear
Heckrotor: Drehrate 150, Empfindlichkeit 95, Expo Linear - Bank0 (für normales 3D): Pitch
100, Wendigkeit
45, Empfindlichkeit
55, Steuerverhalten
Weich, Expo
Linear
Heckrotor: Drehrate 150, Empfindlichkeit 95, Expo Linear
Wenn ich das Steuerverhalten auf Aggresiv oder Hard 3D stelle, habe ich immer das Gefühl, dass mir das V-Stabi reinsteuert. Das Gefühl habe ich im Steuerverhalten Normal nicht. Wegen den längeren Servohebelarmen mussten noch die Werte für Cyclic Ring und Entfernung im Expert-Parameter Einstellbereich unter Taumelscheibenservos verändert werden.
- Cyclic Ring: 70
- Servoparameter Entfernung für CH1, CH2 und CH3: 90 Die Regelkreis-Optimierung für den Hauptrotor hatte ich nur für 4 Flüge eingeschaltet, damit sich das System nicht selbst kaputt konfiguriert. Hier ist es ratsam, schon nach ein oder zwei Flügen das Setup auf dem Computer zu sichern. So kann man immer wieder zurückkehren (was bei mir mehrmals notwendig war). Beim Sichern ist es wichtig, dass man jede Bank einzeln sichert.
Sendereinstellung:
- Heckrotor Dual Rate 70% mit -20% Expo und 100% Dual Rate mit -40% Expo für die schnellen Piruetten.
- Nick Dual Rate 100% und -60% Expo.
- Roll Dual Rate 100% und -60% Expo.
- -15% Expo auf Pitch
Das Setup ist nur ein Vorschlag und muss natürlich nicht jedem Piloten gleich gut liegen. Es dient lediglich als Anhaltspunkt, damit das Flugverhalten des echten Helis dem Setup des Logo 600 3D V-Stabi im neXt Flugsimulator entspricht.
![]()
![]()
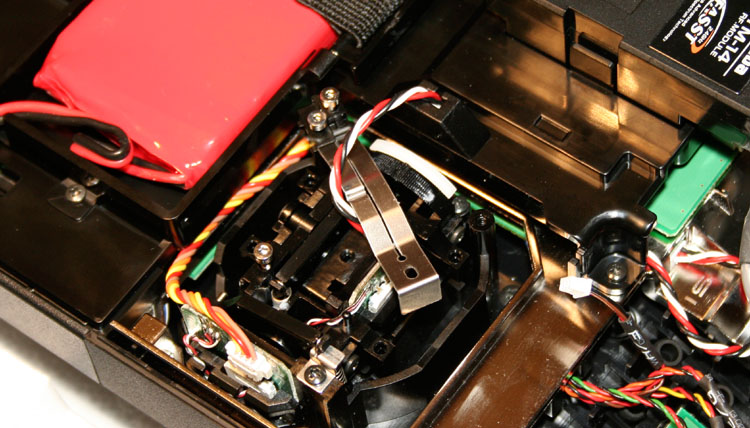
Die zusätzliche Heckstrebenabstützung habe ich genauso wie beim Three Dee und T-Rex erstellt. Wie dem Text oben zu entnehmen ist, habe ich die hier abgebildeten Servohebel durch längere Hebel ersetzt. Wie im Bild auch zu sehen ist, arretiere ich die Stromkabel immer mit dem ohnehin schon vorhandenen Klettband. So wird sichergestellt, dass sich die Stromstecker sich im Flug nicht lösen.
![]()
Das ist der Anti-Blitz-Widerstand an der Minus-Leitung des Reglers.
![]()
Die Antennenmontage sichert gleichzeitig das Heckrohr und sorgt für einen gleichbleibend hervorragenden Empfang.
![]()
Für das Akkupolster habe ich erst eine Papierschablone erstellt. Die vorderen Stege der Kunststoff-Seitenteile sind ausgespart. Damit der Akku in den hinteren 5 cm minimal geklemmt wird, habe ich die hintere Chassis-Ausrundung nicht ausgespart.
![]()
So schauen die verklebten Schaumstoffplatten aus.
![]()
Damit die Haube nicht klappert, habe ich ein Schaumstoffpolster auf den vorderen Fahrwerksbügel geklebt. Diese Dämpfung ist mit den Align-Fahrwerksbügeln nicht mehr notwendig, da diese ja doppelt so dick sind und sowieso nix mehr klappert.
![]()
Die winklige Montage des V-Stabi-Sensors ist besonders knifflig. Die Mittenmarkierung auf dem Sensor kann man rechts erkennen und links sieht man die Peilung.
Die Rasterung des Pitchknüppels habe ich mit einer Mittenraste versehen damit ich den 0° Winkel für sauberen Kunstflug zielsicher finde. Damit es beim 3D-Fliegen nicht so holpert, verwende ich immer noch einen Taumelscheibenring als mechanischen Knüppelwegbegrenzer.
![]()
Hier kann man erkennen, dass in Nullstellung die Servohebel ca. 2° nach oben zeigen. Bei Verwendung der längeren Servohebel ist der Steuerweg nur so exakt spiegelbildlich.
![]()
Das Kabel ist über die Schraube am Heckrohr elektrisch angeschlossen. Das andere Ende des Antistatik-Kabels habe ich mit dem Empfänger (Masse) verbunden.
![]()
Hier ist meine aktuelle Konfiguration abgebildet. 600er Radix, 105er FunKeys, lange Servohebel und das Align Fahrwerk.
Meine Meinung
- Dieser gnadenlos überpowerte Heli macht unheimlich viel Spaß. Es ist einzigartig, dass man einen 700er Motor in einem 600er Heli verbauen kann. Respekt !!!!